📋 Objetivo
Configurar el variador de frecuencia ABB para que:
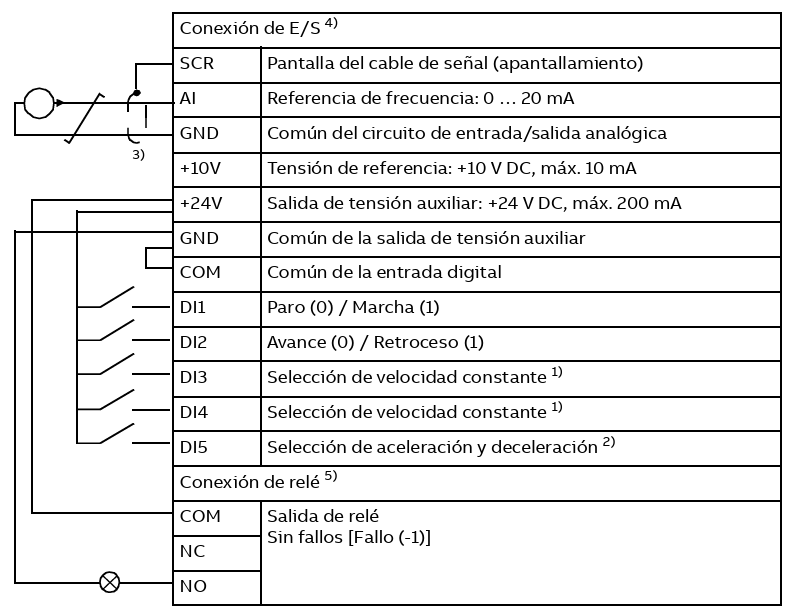
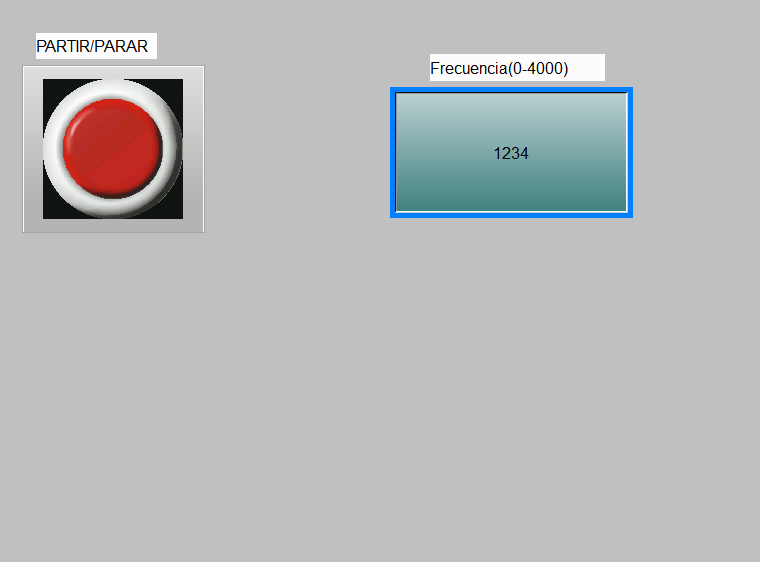
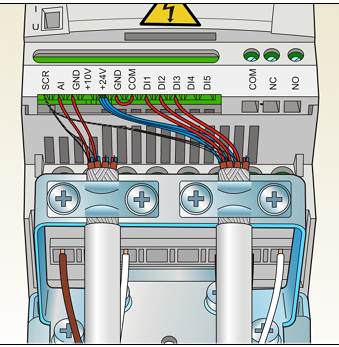
- La activación/paro del motor se controle por una señal discreta (contacto seco) en el borne de control del VFD.
- La frecuencia de salida sea determinada por una señal analógica de 0 V a 10 V aplicada al borne analógico AI1 del VFD.
🔧 Pasos de Configuración en el Panel del VFD ABB
- Acceder al menú de parámetros del VFD ABB desde el panel de operación.
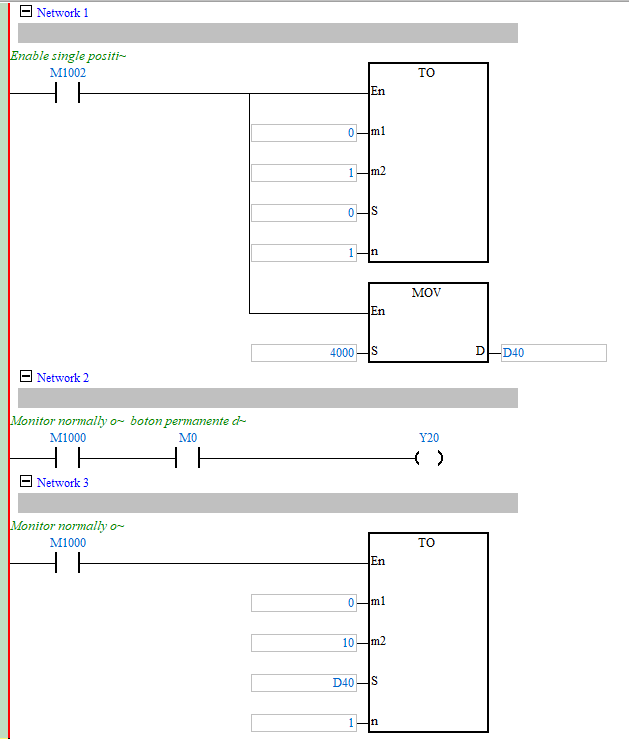
- Configurar el grupo de arranque/paro: seleccionar Arranque por borne digital (DI1).
- Configurar el grupo de referencia de frecuencia: seleccionar AI1 (0–10 V) como fuente de referencia.
- Establecer la frecuencia mínima (0 Hz) y frecuencia máxima (50 Hz).
- Verificar que la curva V/f esté configurada correctamente para el motor.
- Guardar la configuración y verificar el estado de los parámetros.
| Parámetro ABB | Valor Configurado | Descripción |
|---|---|---|
| Start/Stop Source | DI1 (bornero) | Arranque por contacto seco |
| Frequency Reference | AI1 (0–10 V) | Referencia de frecuencia analógica |
| AI1 Minimum | 0.0 V | Corresponde a 0 Hz |
| AI1 Maximum | 10.0 V | Corresponde a 50 Hz (fmax) |
| Min Frequency | 0 Hz | Frecuencia mínima de salida |
| Max Frequency | 50 Hz | Frecuencia máxima de salida |
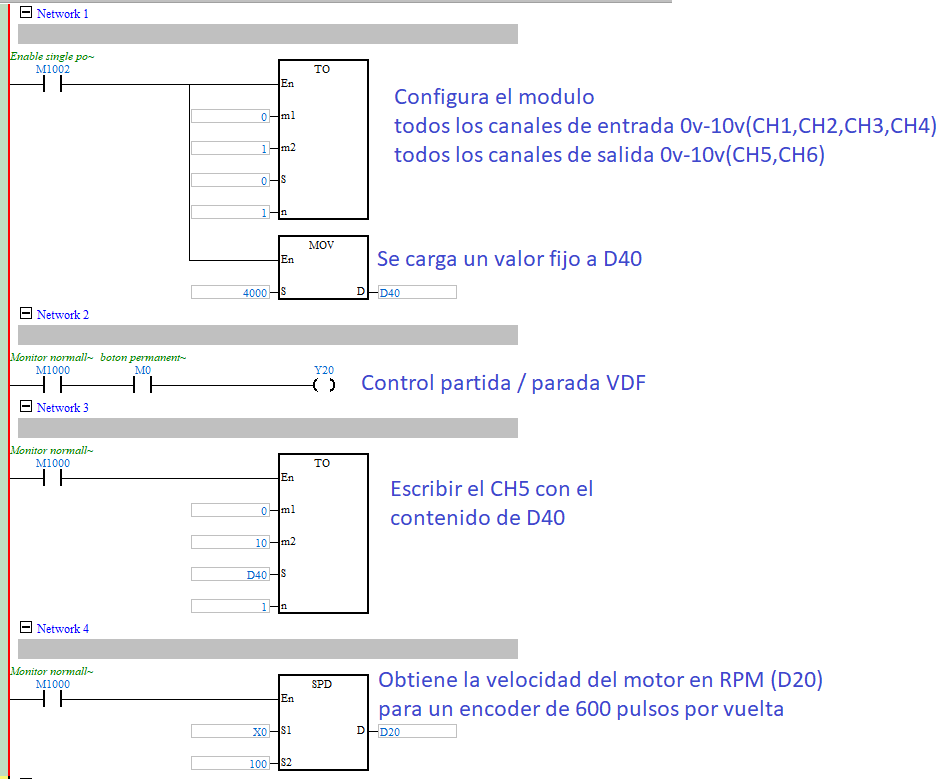
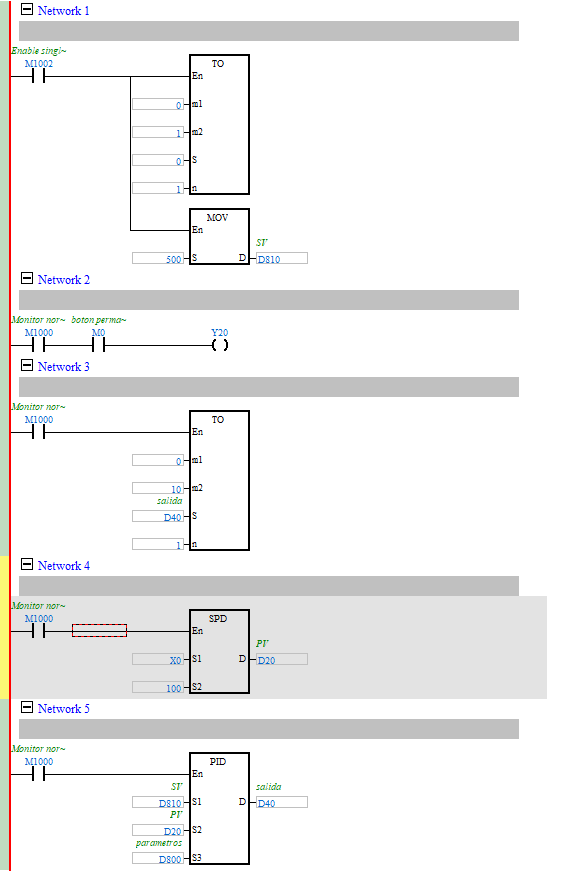
1.PNG
Captura del panel del VFD ABB mostrando los parámetros de configuración.
Seguridad
Verificar que el motor esté correctamente acoplado y que no haya personas cerca del eje antes de realizar pruebas de arranque. Asegurar que la rampa de aceleración esté configurada (ej. 3–5 segundos) para evitar corrientes de arranque excesivas.